Overview
This project was completed as my Final Year Project during my Mechanical Engineering degree. It investigates whether the mechanical complexity of a helicopter swashplate can be replaced with an entirely electronic cyclic control system.
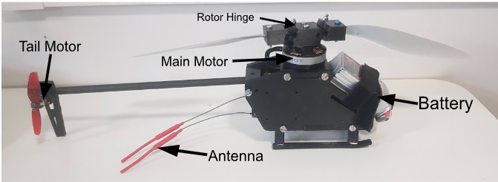
Instead of using servos and linkages to vary blade pitch, this UAV generates cyclic control by rapidly modulating motor torque in synchronisation with rotor position. This produces directional lift through passive blade hinges, achieving pitch and roll authority without a swashplate.
The concept builds directly on academic work from the University of Pennsylvania, particularly research by James Paulos under Prof. Mark Yim, which demonstrated that underactuated rotors with passive hinges can be controlled using a single motor.
Core Idea: Electronic Cyclic Control
In a conventional helicopter, cyclic pitch is achieved mechanically by tilting a swashplate. In this UAV, cyclic control is generated electronically by synchronising motor torque with rotor position.
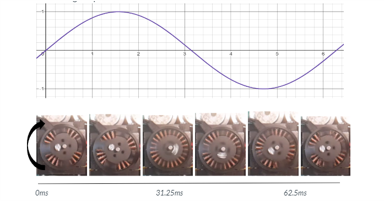
A magnetic encoder mounted beneath the motor shaft provides absolute angular position. This allows the motor torque to be modulated once per rotation using a sinusoidal control signal. The resulting lead–lag motion of the hinged blades produces a cyclic variation in blade pitch, generating directional lift without any moving control surfaces.
Engineering Highlights
- Custom swashplate-less rotor hub with angled lead–lag hinges
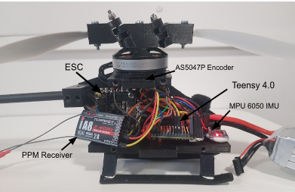
- AS5047P magnetic encoder providing absolute rotor position feedback
- Teensy 4.0 microcontroller running closed-loop control at ~500 Hz
- Electronic speed controller driven at up to 4 kHz using Oneshot125
- Custom control mixing using sine and cosine of rotor angle
- Thrust, PID, and torque modulation testing in an acrylic safety cage
Referenced Research & Inspiration
A key academic reference for this work is the swashplate-less rotor research carried out at the University of Pennsylvania by James Paulos under the supervision of Prof. Mark Yim. Their work demonstrates how passive blade hinges and precise motor control can replace traditional cyclic mechanisms in micro air vehicles.

Additional inspiration came from independent experimentation in the maker community, particularly Tom Stanton’s YouTube work exploring virtual swashplates and speed-modulated rotor control using angled hinges. His demonstrations provided practical insight into real-world implementation challenges of swashplate-less flight.
Control System & Firmware
Initial attempts to integrate the system with a traditional flight controller proved impractical due to the unconventional control architecture. The final design uses the Teensy 4.0 as the primary flight controller, handling radio input, IMU fusion, PID stabilisation, encoder feedback, and motor control on a single microcontroller.
The firmware was adapted from the open-source dRehmFlight project, with significant modifications to support cyclic torque modulation. Pitch and roll commands are resolved into sinusoidal motor commands based on the real-time rotor angle.
Mechanical Design & Analysis
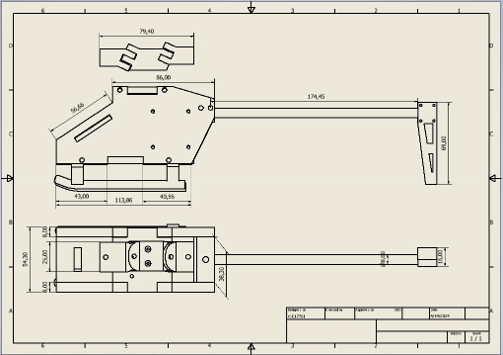
The airframe was designed for rapid iteration and manufactured primarily from 3D printed PLA, with a carbon fibre tail boom supporting the yaw rotor. Finite Element Analysis was performed on critical structural components to validate strength under worst-case thrust and moment loads.
Despite the lightweight construction, stresses remained well below material limits, even under conservative loading assumptions.
Testing & Results
Extensive ground testing was carried out before flight attempts. This included encoder verification, IMU validation, PID response testing, thrust measurement, and slow-motion analysis of blade motion.
Thrust testing showed that the hinged rotor produces slightly reduced efficiency compared to a rigid propeller, likely due to non-optimal blade angles under constant RPM. Initial flight tests demonstrated controllability but highlighted sensitivity to hinge friction and mass balance.
Key Disadvantage: Motor Speed Modulation
The primary disadvantage of a swashplate-less cyclic system is its reliance on continuous acceleration and deceleration of the main rotor motor within each revolution.
Unlike traditional helicopters that operate the main rotor at near-constant RPM, this approach requires high-bandwidth torque control to repeatedly speed up and slow down the motor in precise angular phases.
- Increased electrical and thermal stress on the motor and ESC
- Reduced efficiency compared to constant-RPM operation
- Greater dependence on fast control loops and accurate rotor position sensing
Future Work
- Refine hinge geometry and materials to reduce friction
- Implement stroboscopic blade pitch visualisation
- Explore dual-main-rotor (dualcopter) configurations
- Investigate applications in micro air vehicles (MAVs)
Skills & Tools
- CAD & Simulation: SolidWorks, ANSYS FEA
- Embedded Systems: Teensy 4.0, IMUs, magnetic encoders
- Control Systems: PID tuning, cyclic control, sensor fusion
- Programming: C++, Arduino framework
- Testing: Thrust measurement, data logging, high-speed video